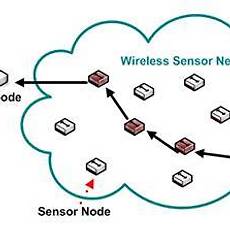
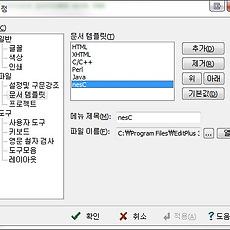
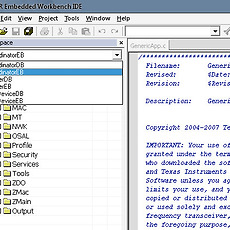
무선 센서 네트워크(Wireless Sensor Network : WSN) 무선 센서 네트워크(이하 WSN)는 "아주 많은 소형의 센서 노드(Sensor Node)들이 무선(Wireless)을 통해 네트워크(Network)에 연결되어 있다" 라고 간단히 정의 내릴 수 있다. 즉, WSN은 컴퓨팅 능령과 무선 통신 능력을 갖춘 센서 노드를 응용 환경에 배치하고, 자율적으로 네트워크를 형성 한 후, 센서 노드로 부터 획득한 물리적 정보들을 무선으로 수집하여 감시/제어 등의 용도로 활용하는 기술을 말한다. WSN의 궁극적인 목적은 모든 사물에 컴퓨팅 능력 및 무선 통신 능력을 부여하여 "언제", "어디서나" 사물들끼리의 통신이 가능한 유비쿼터스 환경을 구현하는 것이다. 현재 법제화 및 표준화가 진행되고 있는 Internet of Things, 사물통신망, Machine-to-Mach.. EditPlus에 nesC 문법 적용 TinyOS 개발을 위한 nesC는 아직 이러다할 개발환경이 없다. 이클립스용 TinyOS 플러그인이 존재하지만 많이 쓰지는 않는것 같다(아닌가,, -_-;;;). 여튼 TinyOS가 유닉스 환경 이기때문에 보통 vi 편집기나 기타 텍스트 편집기를 많이 쓴다. 지금 소개하는 것은 유명한 텍스트 편집기인 EditPlus에 nesC문법을 적용하는것으로 EditPlus를 이용하는 유저에게 유용할 것으로 보인다. 다음을 잘 따라하기 바란다. 1. 다음의 파일들을 다운 받아 EditPlus 폴더에 복사한다. 2. EditPlus를 실행시키고 파일 - 새파일 - 문서 템플릿 구성으로 이동한다. 추가를 클릭하여 nesC.nc 파일을 추가한다. 메뉴 제목은 nesC로 한다. 3. 설정 및 구문강조 항목으로 이동한후 추.. TinyOS 2.x 설치(개인용) 1. Cygwin 설치 (1) Setup.exe 클릭 (2) Install from local directory 선택 후 다음 (3) 기본 설정 확인 후 다음 (4) All-Instali, Misc-Install로 바꾼 후 다음 (5) 모두 설치된 후 마침 2. TinyOS 2.x 설치 (1) 폴더의 파일을 복사하여 Cygwin이 설치된 폴더의 opt 폴더로 이동 (2) Cygwin 창에서 opt 폴더로 이동 후 ./Install_TinyOS2X.sh 명령 3. 패스 설정 (1) vi ~/.bashrc 명령 후 다음 내용을 마지막 줄에 추가 export TOSROOT=/opt/tinyos-2.x export TOSDIR=$TOSROOT/tos export CLASSPATH=`cygpath -w $TOSR.. Cygwin 명령어 1. 컴파일 및 다운로드 명령 - make telosb - make telosb install : 컴파일 및 다운로드 - make telosb reinstall : 다운로드 2. 삭제 명령 - make clean : build 폴더 삭제 3. 환경변수 설정 확인 - env | grep TOS 4. 센서 노드 연결 확인 - motelist [Z-Stack] GenericApp 시작하기 1.준비 1) GenericApp는 보통의 프로그래밍에서 "Hello World"와 같은 기초적인 App이다. 2) CC2430DB에서 보내진 "Welcome to UBSYS"를 SmartRF04EB의 LCD에서 출력해본다. 2. CC2430DB에 포팅 1) Workspace에서 EndDeviceDB를 선택하고 App폴더의 GenericApp.c를 클릭한다. 그림에서 보는 것과 같이 블록이잡힌 부분을 수정한후 CC2430DB에 포팅한다. 2) Workspace에서 CoordinatorEB를 선택하고 SmartRF04EB에 포팅한다. 3) SmartRF04EB를 재부팅한다. 4) CC2430DB를 재부팅한다. 네트워크에 접속되면 LED2(Red)에 불이 들어온다. 3. 동작 - SW1 : - SW2 : i.. [Z-Stack] SampleApp 시작하기 1. 관련 소프트웨어 설치 1) Z-Stack CC2430 1.4.3-1.2.1 2) IAR EW8051 7.30B 2. Coordinator에 SampleLight 포팅 1) SampleApp.eww를 불러온다. 2) Workspace에서 DemoEB를 선택한다. 3) Project메뉴에서 Rebuild All을 선택한다. 4) Rebuild가 완료되면 Debug를 한다. 5) 포팅이 완료되면 Debug를 멈춘다. 6) SmartRF04EB를 재부팅한다. 재부팅후 각각의 보드에서 IEEE Address가 표시되는 것을 볼 수 있다. 3. SampleApp 실행 1) 두개의 보드중 하나의 보드가 Coordinator가 되기 위해서는 Jumper설정을 해주어야 한다. 다른 하나는 자동으로 Router가 된.. 이전 1 2 다음